
Robo Roscos UNEARTHED Season
gloe is an app designed to help users find LEGO bricks in a mixed pile by using object detection or other depth-sensing technology built into modern devices. By scanning the pile in 3D, the app can detect the shapes and positions of individual bricks—even those that are overlapping or partially hidden&madash;making it much easier to locate specific pieces quickly. Once the scan is complete, gloe identifies brick types, highlights where each piece is located, and can even help users sort or catalog their collection. This transforms the often frustrating process of digging through loose Lego bricks into a fast, efficient, and surprisingly high-tech experience.
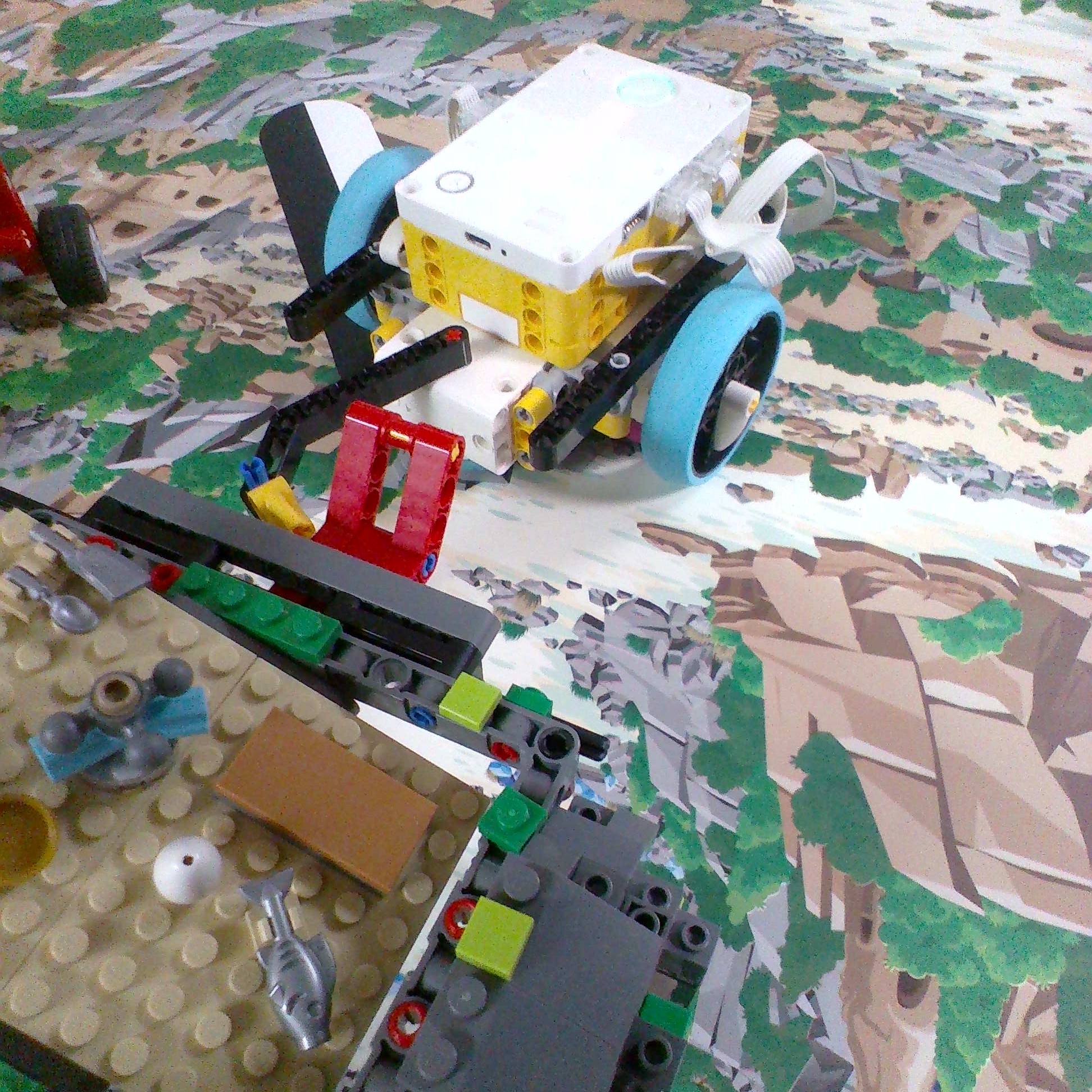
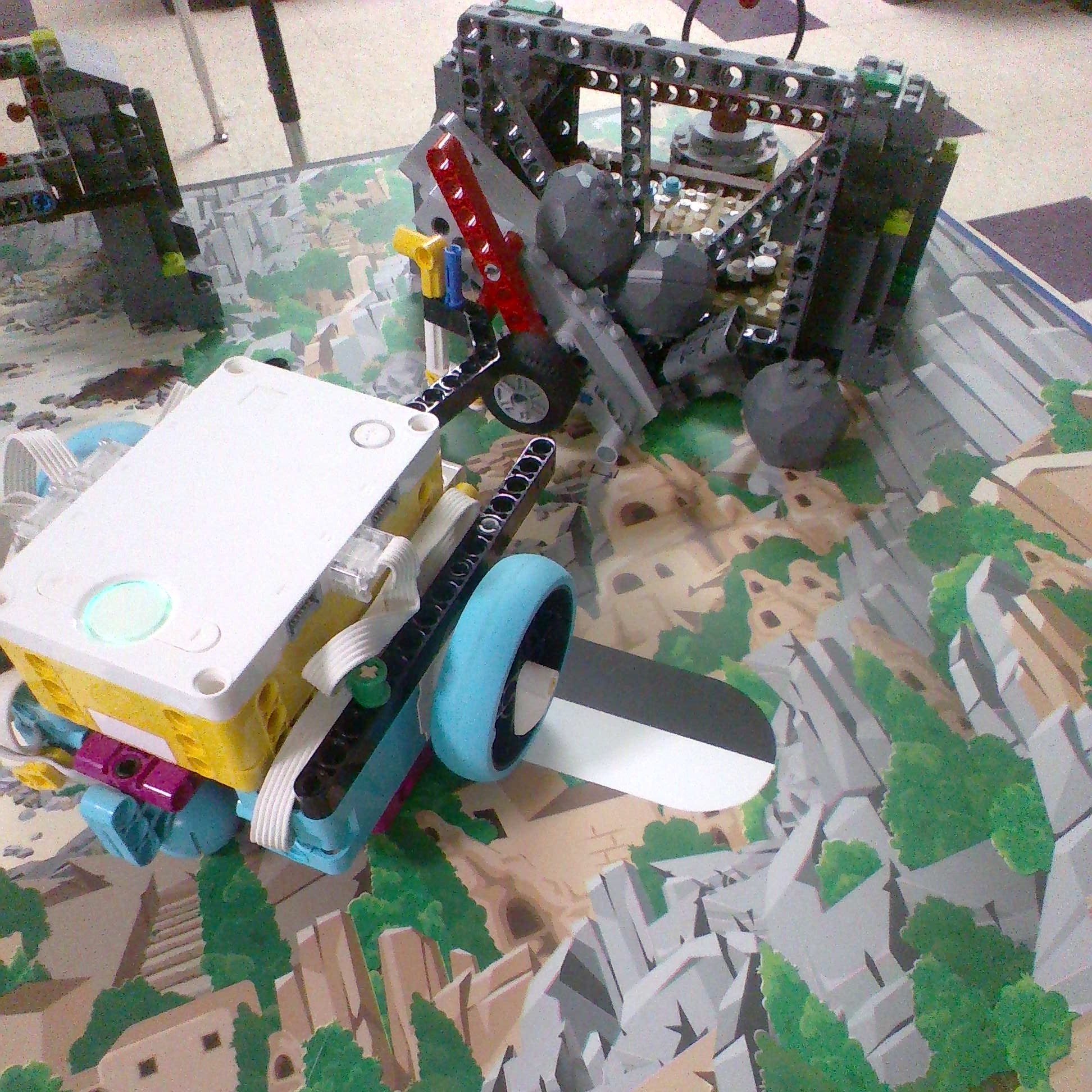
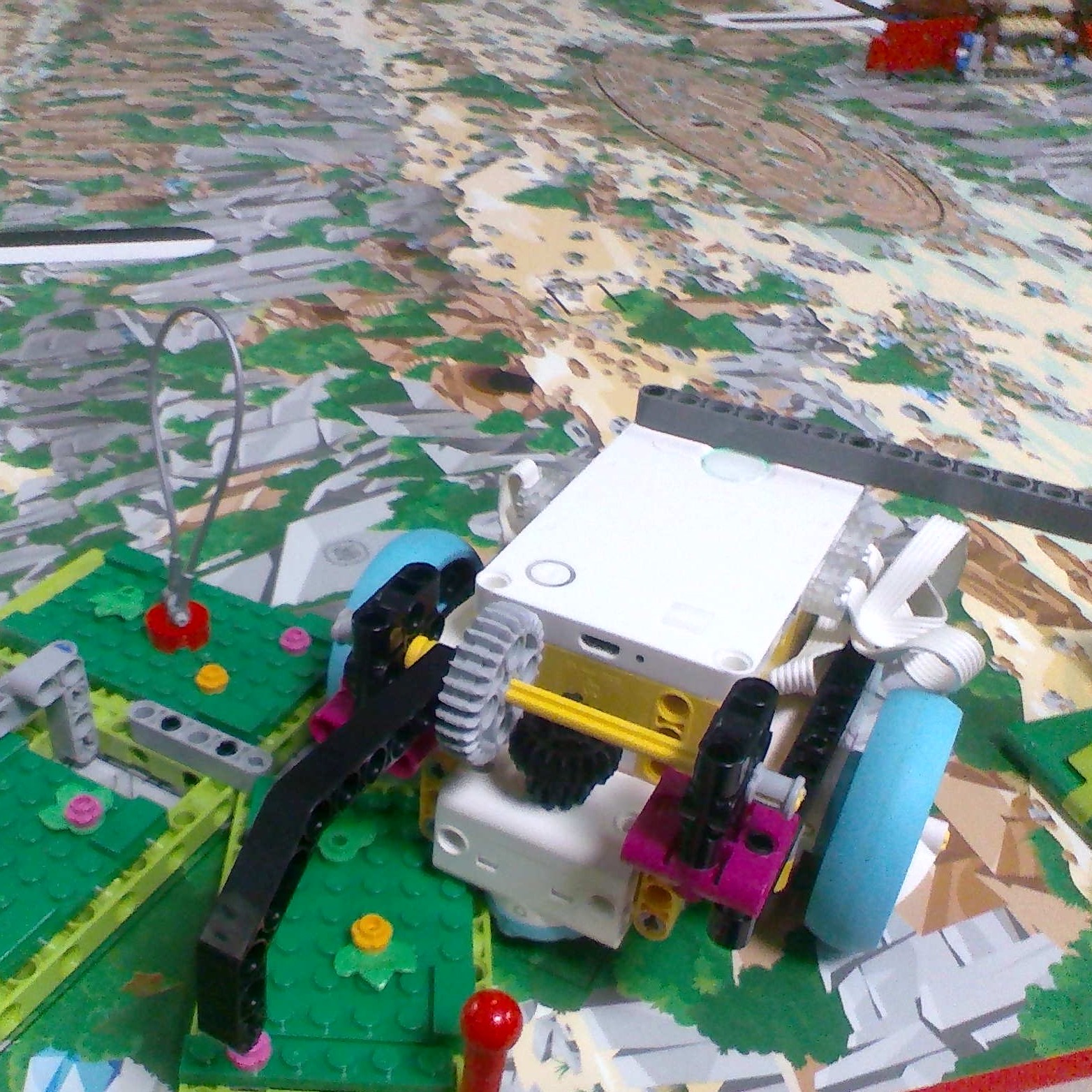
Below is a representation of our robot completing missions. This year we accomplished eight missions, a team record-high. We have grown in our ability to engineer and design our robot to carry out functions efficiently. The UNEARTHED season was a big jump from previous years.
This year, our robot design had four main extensions. Our first two attachments are hook-shaped arms. One swivels up and down, while the other swivels left to right. The third attachment is a bulldozer. This is utilized to push objects when necessary. The fourth attachment is a long, straight arm. Unlike the other arms, this one isn't controlled by a motor. It is used for hitting objects that are far from the robot.
Mission 5
Mission 12

Mission 6
Mission 2
Mission 1

Mission 9

Mission 7

Mission 10
